by Laura Carrabine, Senior Editor
Thursday, December 10, 2009
There are many types of robots that automate tasks in manufacturing and assembly lines. Depending on the application, a range of robots can be used including Scara, Delta, articulated arm, and Cartesian configurations. To make a decision on which type to implement, consider work load, working area, speed, and precision requirements. Given these parameters, some robots outperform others in particular applications. 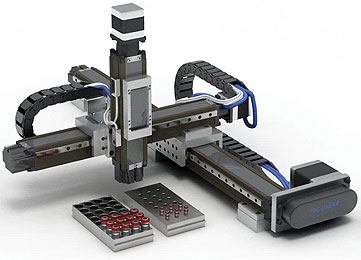
Cartesian robots can be configured as center-stacked, cantilevered, or as a gantry assembly.
Cartesian robots operate well in many different applications because of their high speed travel, precise multi-axial guidance, wide working envelope, and versatility. They can be used in packaging, dispensing, palletizing, and large-scale assembly. These robots can be designed as center-stacked assemblies for low-cost, high speed linear guidance. They can also be used for cantilevered linear motion for precision pick-and-place uses, and can be used as gantries to accomplish tasks using overhead manipulation. This use helps free up floor space and can simplify the assembly line. High performance multi-axial gantries can precisely lift heavy loads along a wide working space for repeatable operation and sophisticated automation.
Simplifying controllers is a growing trend in robotics today. Typically, along an assembly line, each robot has its own unique controlling system. A master controller is used for control of the overall assembly line. In turn, each robot controller has its own software, manual, and technical guide. This scenario usually necessitates additional machine training and maintenance costs. Cartesian assemblies require fewer controllers and less periodic maintenance and training.
Robot Formats
Cartesian
• Can be designed as center-stacked, cantilevered, or in a gantry assembly
• Versatile
• Simplifies robot and master control systems
• Large work envelope
• Accurate
Scara
• Donut shaped work envelope
• Small footprint
• High speed capabilities
• Perform well in short-stroke, fast assembly, and pick-and-place applications
Disadvantage:
• Typically requires dedicated robot controller in addition to line master controller like PLC/PC
Delta
• High speed
• Contact lens shaped working envelope
• Excels in high speed, lightweight pick and place applications
Disadvantage:
• Typically requires dedicated robot controller in addition to line master controller like PLC/PC
Articulated arm
• Reach over and under objects
• High speed
• Large working envelope
• Good in unique controller, welding, and painting applications
Disadvantage:
• Typically requires dedicated robot controller in addition to line master controller like PLC/PC

PBC Linear
www.pbclinear.com
::Design World::